Software
Crowd simulation
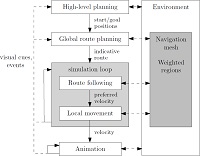
The Utrecht University Crowd Simulation (UUCS) Framework creates high-quality navigation meshes and uses them for path planning and crowd simulation. On this page we describe the features and technical properties of our framework.
For some examples, please refer to our case studies. We do not license the plugin, but we are open for collaboration in research projects. Please contact Roland Geraerts for more information or visit the website of our academic spin-off uCrowds.
Many people have contributed to this software, including my PhD students,
Arne Hillebrand,
Wouter van Toll,
Norman Jaklin,
and many other people, including Angelos Kremyzas, Ioannis Karamouzas, Arthur van Goethem, Mihai Polak, Jordi Vermeulen, Martijn Koenis, Marijn van der Zwan,
Mark tibboel and Andrei Cibotaru.






.")
.")
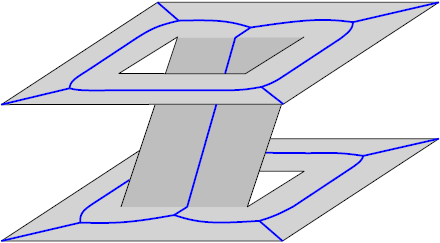
 with 8 multi-layered buildings, generated in 0.9s (926ms)")